Eigene Konstruktionen
Geschwindigkeitsmessstrecke
Motivation
Mein Sohn hat eines Tages ein Bild des "Slammer Turbo" (Set-Nr. 8242) mit eingebautem Geschwindigkeitsmesser (Set-Nr. 5206) gesehen und den Geschwindigkeitsmesser mit dem LEGO Mindstorms RCX-Baustein verwechselt. Schon war die Idee geboren, mit Hilfe des RCX eine Geschwindigkeitsmessstrecke zu bauen.
Es handelt sich um mein erstes eigenständige Mindstorms-Projekt und ist dementsprechend einfach gehalten.
Hier eine Gesamtansicht:

Vorüberlegungen
Ein LEGO-Auto soll am Beginn und Ende einer bekannten Strecke einen Sensor auslösen. Der RCX soll die Zeit zwischen den Auslösungen messen, die Geschwindigkeit berechnen und anzeigen.
Als Sensoren stand ein Lichtsensor und ein Berührungssensor zur Verfügung. Der Lichtsensor hat den Vorteil, berührungslos zu messen. Deshalb kommt er am Beginn der Messstrecke zum Einsatz, um das Auto nicht abzubremsen.
Probemessungen ergeben, dass sich das Auto etwa mit 1m/sec bewegt.
Die beste Auflösung der Zeitmessung beträgt +/-0.1sec.
Diese beiden Größen besteimmen, dass für eine Messgenaugkeit von 10% eine Messstrecke von midestens 1 Meter erforderlich ist!
Natürlich kann man bei einer so großen Strecke nicht mehr von Messung der Maximalgeschwindigkeit sondern nur noch der Durchschnittsgeschwindigkeit sprechen.
Die Messstellen (bezogen auf das Auto) müssen an Start und Ziel identisch sein.
Am Ziel ist es das Einfachste, das Auto gegen einen Preller fahren zu lassen, der den Taster auslöst - es wird also ganz vorne gemessen.
Demzufolge muss der erste Impuls des Lichtsensors für die Stoppuhr-Auslösung verwendet werden.
Realisierung (Hardware)
Die Realisierung der Messstrecke sollte möglichst einfach sein.
Die beiden Sensoren sind an den Enden einer langen Stange, eine Einheit breit und 21/3; Einheiten hoch, befestigt.

Links sehen Sie den Startsensor direkt am RCX montiert.
Bei Vorbeifahrt des Autos schaltet der Lichtsensor auf "dunkel".
Wichtig ist dafür, dass ausreichend Umgebungslicht vorhanden ist.
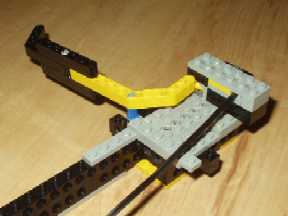
Rechts der Zielsensor im "gespannten" Zustand: Die Schranke drückt in dieser Position den Taster nieder ...

... und lässt ihn los, sobald das Auto die Schranke anstößt.
Nachteil dieser Konstruktion ist, dass die Schranke vor jeder Messung "gespannt" werden muss. Grund für diese Art der Realisierung war, dass die Teile so am einfachsten zusammenpassten und dass das Auto auch nach Passieren des Ziels noch weiterfahren kann.
Realisierung (Software)
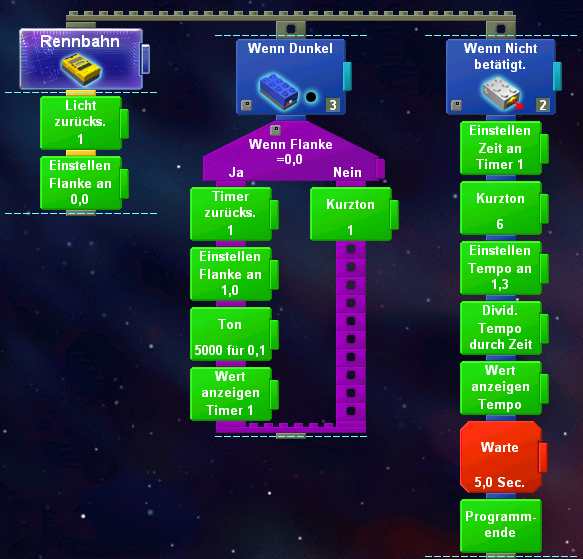
Hier sehen Sie das Programm auf der Mindstorms Oberfläche:
Hier können Sie das Programm laden!
Die linke Säule repräsentiert das Hauptprogramm, das nichts anderes tut, als den Lichtsensor zu initialisieren, d.h. die automatische hell/dunkel-Skalierung an die aktuellen Lichtverhältnisse anpassen, und die Variable "Flanke" auf Null zu setzen. Ansonsten wartet es nur auf Ereignisse an den Start- und Ziel-Sensoren.
Die mittlere Säule tritt in Aktion, sobald am Licht-Sensor (Start) etwas passiert:
Das vorbeifahrende Auto verdunkelt den Sensor. In diesem Fall wird zuerst geprüft, ob die Variable "Flanke" noch auf Null steht. Falls ja, ist es die erste Auslösung des Sensors, falls nicht eine folgende, die nicht weiter bearbeitet werden soll. Mit dieser Unterscheidung wird sichergestellt, dass die Zeitmessung von der Front des Autos ausgelöst wird (s.o.). Ein kleiner Fehler entsteht natürlich durch die erfoderliche Rechenzeit für die Variablenabfrage und dadurch, dass der Lichtsensor nicht zwangsläufig durch das vorderste Autoteil ausgelöst wird, sondern u.U. erst durch das Rad. Dieser Fehler, der nur zu hohe angezeigte Geschwindigkeiten zur Folge hat, wird in Kauf genommen.
Wenn es sich also um den ersten Impuls am Lichtsensor handelt, wird die Stoppuhr (Timer1) auf Null gesetzt und die Variable "Flanke" auf "1", damit ein weiterer Impuls nicht zum erneuten Zurücksetzen der Stoppuhr führt.
danach wird noch ein Quittungston ausgegeben und die laufende Stoppuhr im Display des RCX angetzeigt.
Die rechte Spalte beschreibt den Programmablauf bei Zieldurchfahrt: Sobald das Auto die Schranke berührt, wird der Schalter freigegeben und diese Routine ausgelöst:
Die Stoppuhr wird in eine Variable "Zeit" geschrieben. Darin steht also nun die Zeit in Sekunden, die zwischen erstem Auslösen der Lichtschranke und Freigeben des Tasters lag.
Die nächsten beiden Schritte berechnen aus der Zeit und der Entfernung zwischen den Sensoren (1.3m; das muss ggf. individuell an die Rennstrecke angepasst werden) die Geschwindigkeit und zeigen sie im Display des RCX an.
Der "Warte"-Befehl dient dazu, vor Beendigung des Programms so lange zu warten, bis der Quittungston vollständig abgespielt ist! Eine wichtige Eigenschaft des RCX ist nämlich, dass die Programmausführung fortgesetzt wird, während der Ton noch spielt!
Technische Probleme
- Die Zeitauflösung des RCX von 0.1sec führt zu einer so langen Messstrecke, dass nicht immer gewährleistet ist, dass die Autos auch am Ziel ankommen bzw. auch die Schranke treffen.
- Der Lichtsensor braucht gute Lichtverhältnisse, damit die relativ kurze Dunkelschaltung durch das vorbeifahrende Auto auch erkannt wird.

Falls diese Seite ohne Navigationsleiste angezeigt wird, aktivieren Sie Javascript oder klicken Sie hier!